
从零开始在树莓派上部署 Nonebot2 QQ Bot
硬件准备:
- 树莓派 4B(
8GB内存)- 散热片 + 小风扇(考虑到 Bot 服务需要长时间运行)
- SD 卡一张(存储最好大一点)
- USB-SD 卡转接器(用于在 SD 卡上安装操作系统)
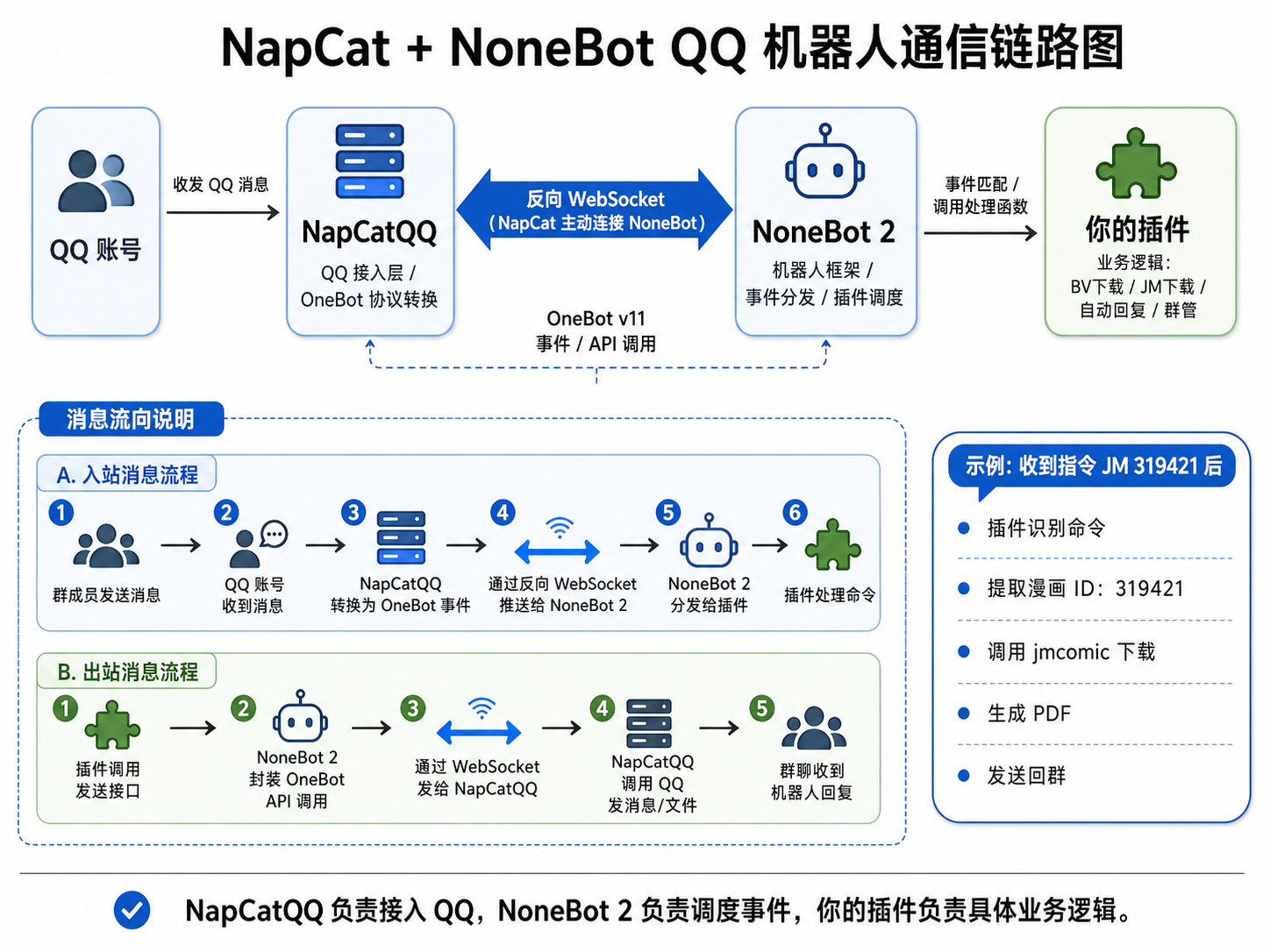
1. 方案总览
基于 NapCat + NoneBot 的 QQ 机器人通信链路如下图所示(AI 画图真好用啊💦):
2. 操作系统选择与安装
我们的需求目前只是将一个机器人服务跑在树莓派上,因此操作系统最好使用无桌面的版本以减轻树莓派负担。
由于树莓派官方明确写了,Raspberry Pi OS 是官方支持、并且“推荐用于大多数树莓派场景”的系统;它本身又是基于 Debian、并针对树莓派硬件做了优化。同时官方提供了 64 位 Lite 版,并明确说明 Lite 没有图形桌面,非常适合 **headless servers(无头服务器)**这种用途。
于是这里我们选择 Raspberry Pi OS Lite (64-bit) 作为我们使用的操作系统。
接下来,我们将采用树莓派官方的 Raspberry Pi Imager 软件包来安装操作系统。
对于 Archlinux 用户,包管理器仓库里的软件包如下所示:
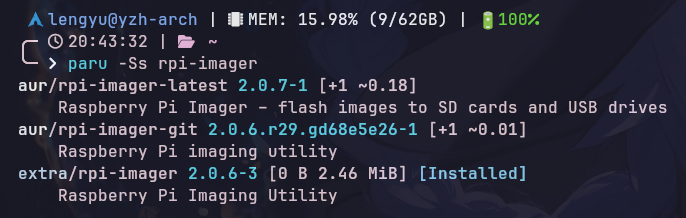
执行下方指令安装 rpi-imager:
# 使用 pacman 安装
sudo pacman -S rpi-imager
# 或者 paru
paru -S rpi-imager安装完成后,先将 SD 卡插入转接器,再将转接器插入电脑 USB 接口,打开 Raspberry Pi Imager,按照提示在 SD 卡中安装 Raspberry Pi OS Lite (64-bit),如下所示:
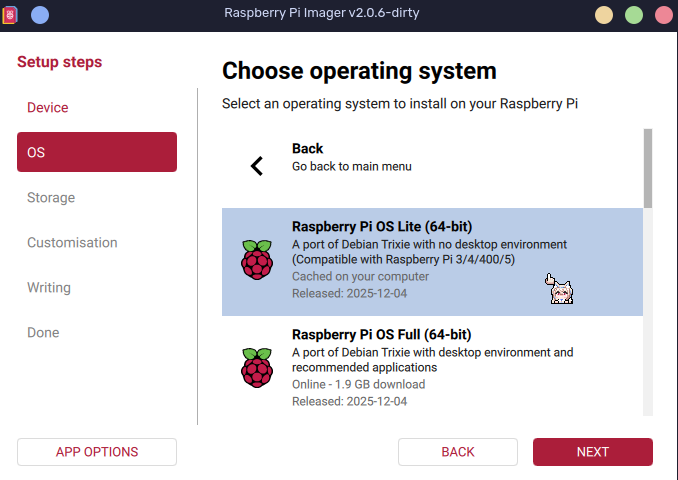
等待安装完成后,将 SD 卡插入树莓派,再给树莓派接上外接显示器,接下来就可以开始操作系统的简单配置了。
3. 服务器的简单配置
由于通过 rpi-imager 安装的 Raspberry Pi OS Lite 系统本身就已经具有了一定的配置,所以我们需要配的并不多
3.1 更新系统
sudo apt update
sudo apt full-upgrade -y
# 更新完之后重新启动
reboot3.2 安装常用工具
虽然这些不是树莓派官方强制要求,但是后面部署 NoneBot 的时候会用上:
sudo apt update
sudo apt install -y \
git curl wget vim nano tmux htop tree unzip zip ca-certificates \
python3-venv python3-pip pipx sqlite3 jq lsof rsync dnsutils net-tools \
build-essential ufw
pipx ensurepath3.3 安装 zsh
相比于 bash,zsh 的优点如下:
- 命令补全体验更好
- 提示符更灵活
- 历史记录和自动建议更舒服
- 交互使用更顺手
- 脚本配置语言和 bash 几乎一致
话不多说,直接安装:
sudo apt update
sudo apt install -y zsh
chsh -s /usr/bin/zsh
# 退出重新登录
rebootzsh 的配置建议写在 ~/.zshrc 里
此外,也可以尝试一下 Coldrain Dotfiles 里的
.zshrc配置喵~ 地址:https://github.com/ziheng5/dotfiles/blob/master/dotfiles/zsh/.zshrc
3.4 终端美化(可选)
这里主要是使用 oh-my-posh 对终端 prompt 进行美化,具体操作参考 Coldrain 的这篇文章
当然,oh-my-posh 的配置 Coldrain 也有一套(在这里),配置文件为 catppuccin_coldrain.omp.json,将这个文件塞到你的 ~/.config/oh-my-posh/themes/ 路径下面
如果你使用的是 Coldrain 的 ~/.zshrc,那么接下来就没有什么配置了,否则需要在你的 ~/.zshrc 中添加如下配置:
eval "$(oh-my-posh init zsh --config ~/.config/oh-my-posh/themes/catppuccin_coldrain.omp.json)"3.5 Neovim + LazyVim
我们后续需要通过 SSH 远程连接到树莓派上进行开发,那么使用终端集成开发环境会很方便,这里我们选择使用 Neovim + LazyVim。Neovim 是 vim 的升级版,极大扩展了 vim 的可配置性,而 LazyVim 是 Neovim 的一套第三方个性化配置方案,其配置程度差不多是将整个 VSCode 塞进终端里。
⚠️ 安装的时候要注意:Raspberry Pi OS Lite 上通过 apt 从仓库里安装到的 neovim 版本过低,似乎很久没有更新了,需要从 Neovim 官方的 Github 仓库下载最新版本:
# 注意,要下载 arm64 版的,因为树莓派是 arm64
curl -LO https://github.com/neovim/neovim/releases/latest/download/nvim-linux-arm64.appimage
# 赋予 appimage 可执行权限
chmod u+x nvim-linux-x86_64.appimage
# 运行安装
./nvim-linux-x86_64.appimage
# 全局配置
mkdir -p /opt/nvim
mv nvim-linux-x86_64.appimage /opt/nvim/nvim然后接下来将下面这一行配置添加到 ~/.bashrc 或 ~/.zshrc里(看你使用哪一个 sh 了):
export PATH="$PATH:/opt/nvim/"Neovim 安装完成!接下来给 Neovim 安装 LazyVim 配置(也可以参考官方文档)
首先对原有的 Neovim 配置进行备份(如果你有的话,否则没必要):
# required
mv ~/.config/nvim{,.bak}
# optional but recommended
mv ~/.local/share/nvim{,.bak}
mv ~/.local/state/nvim{,.bak}
mv ~/.cache/nvim{,.bak}接着从 Github 上 clone 配置文件:
git clone https://github.com/LazyVim/starter ~/.config/nvim接着删除克隆文件夹下的 .git 文件:
rm -rf ~/.config/nvim/git此时启动 Neovim,你会发现你的 Neovim 界面发生巨变:
nvim试试看编辑当前文件夹(nvim ./),你会发现它长得和 VSCode 几乎一模一样:

3.6 SSH 配置与连接
SSH 之前,建议在 Tailscale 上为树莓派搞一个虚拟 IP,这样以后即使没有局域网,也可以走 Tailscale 远程 SSH 连接到你的树莓派。 具体操作请参考官方文档,这里不作展开
首先,先在自己的设备上生成密钥:
# 这里也可以换成你自己的名字
ssh-keygen -t ed25519 -C "coldrain-to-pi"一路回车即可,接下来上传公钥:
# 这里要换成你树莓派上的用户名和你树莓派的局域网 IP 或 Tailscale 虚拟 IP
ssh-copy-id coldrain@192.169.101.240接下来测试能否免密登录:
# 依旧替换成你自己的用户名和 IP
ssh coldrain@192.168.101.240如果可以登录进去,则回到树莓派上备份 SSH 配置:
sudo cp /etc/ssh/sshd_config /etc/ssh/ssh_config.bak.$(date +%F-%H%M%S)然后修改 SSH 配置:
sudo nvim /etc/ssh/sshd_config确认这几项存在且为下面的值:
PubkeyAuthentication yes
PasswordAuthentication no
PermitRootLogin no
ChallengeResponseAuthentication no
UsePAM yes接下来检查配置语法:
sudo sshd -t如果没有任何输出,则可以说明配置语法没有问题,接下来我们重启 SSH 服务即可完成配置:
sudo systemctl restart ssh此外,如果你在自己的设备上通过 kitty SSH 到树莓派,则可能会出现下述情况: “kitty 默认把
TERM设置为xterm-kitty,但你在终端里 SSH 到树莓派上时,树莓派一端没有正确识别xterm-kitty对应的 terminfo 能力描述,导致 zsh 的行编辑变成退格键、光标移动到行为解释出错,进而按下删除键可能反而打出空格” 有两种解决方案:
- 将树莓派端更改为
xterm-256color# 这个配置远端是一定能认识的通用终端类型 export TERM=xterm-256color
- 在树莓派上补上
kitty-terminfo(推荐)sudo apt update sudo apt install -y kitty-terminfo
4. Python 工具链配置
在这个项目里,我们使用 pipx 命令行工具来配置 Python 环境,且每个项目单独配置一个 venv
首先,我们将项目的工作区建立好:
mkdir -p ~/apps ~/apps/qqbot ~/src ~/venvs其中,
~/apps/qqbot用作 NoneBot 项目路径~/src作为平时测试脚本、拉代码的路径~/venvs放置独立虚拟环境
接下来,我们先创建一个虚拟环境并激活它:
cd ~/apps/qqbot
python3 -m venv .venv
source ~/apps/qqbot/.venv/bin/activate激活后,升级虚拟环境里的打包工具:
python -m pip install --upgrade pip setuptools wheel接下来安装我们的项目运行依赖,以及全局 CLI 工具:
pip install nonebot2 nonebot-adapter-onebot
pipx install nb-cli💡 上述工作完成后,可以顺手改一下 pip 配置: 先创建配置目录:
mkdir -p ~/.config/pip接着写配置文件
cat > ~/.config/pip/pip.conf <<'EOF' [global] disable-pip-version-check = true timeout = 120 EOF该配置可以让 pip 不总是提示版本检查,且网络慢一点的时候更“宽容”
5. 创建最小 NoneBot 项目
先创建 .env:
cat > ~/apps/qqbot/.env <<'EOF'
DRIVER=~fastapi+~websockets
HOST=127.0.0.1
PORT=8080
LOG_LEVEL=INFO
COMMAND_START=["/"]
COMMAND_SEP=["."]
ONEBOT_ACCESS_TOKEN=改成你自己的长随机字符串
EOF其中,
HOST默认是127.0.0.1PORT默认是8080COMMAND_START默认是["/"]COMMAND_SEP默认是["."]DRIVER可以通过.env来指定ONEBOT_ACCESS_TOKEN改成一串自己的随机字符串,比如ONEBOT_ACCESS_TOKEN=9sYw4mR2Pq7XcK8nF5uL1aZ6tH3vB0
接下来,创建入口文件 ~/apps/qqbot/bot.py:
import nonebot
from nonebot.adapters.onebot.v11 import Adapter
nonebot.init()
driver = nonebot.get_driver()
driver.register_adapter(Adapter)
nonebot.load_plugins("plugins")
if __name__ == "__main__":
nonebot.run()接下来我们创建插件目录:
mkdir -p ~/apps/qqbot/plugins
touch ~/apps/qqbot/plugins/__init__.py然后创建一个最小测试插件 ~/apps/qqbot/plugins/ping.py:
from nonebot import on_command
from nonebot.adapters.onebot.v11 import MessageEvent
ping = on_command("ping", priority=5, block=True)
@ping.handle()
async def _(event: MessageEvent):
await ping.finish("pong")
6. 接入 NapCat
NapCat 官方文档当前给出的 WebUI 基础操作是:
- 启动 NapCat
- 访问
http://ip:port/webui/ - 进入 QQ 登陆
- 用 QRCode 扫码
- 登陆后进入网络配置
- 点击新建
- 建立对应的服务器或客户端
此外,文档还特别提醒:如果是公网部署,务必启用 Token
话不多说,这里我们再开启一个终端进程,先安装一下 NapCat
NapNeko 的 napcat-linux-installer 仓库当前给出了 Linux 的一键安装命令;Napcat 另一个安装器仓库也写明 Linux 支持 Debian/Ubuntu 这类发行版,并提供 ws / reverse_ws / reverse_http 这些模式
接下来我们在终端里执行安装:
cd ~
curl -o napcat.sh https://raw.githubusercontent.com/NapNeko/napcat-linux-installer/refs/heads/main/install.sh && sudo bash napcat.sh安装完成后,使用 bash 运行安装目录下的 launcher.sh:
# 具体路径看你安装在哪
bash ~/launcher.sh运行成功之后,按照终端给出的提示,我们需要登录 WebUI,在浏览器中访问 http://你的服务器 IP:6099/webui/,然后进入 QQ 登录
这里注意 ⚠️:请使用你想要用来作为机器人的 QQ 号登录 WebUI!
登录完成后,按照页面提示更新 WebUI Token / 修改密码,然后接下来我们在 NapCat WebUI 里配置 OneBot 反向 WebSocket:
- 进入 “网络配置”
- 点击 “新建”
- 选择 WebSocket 客户端
- URL 填:
ws://127.0.0.1:8080/onebot/v11/ws - Token 里填写你在
.env里随便创建的ONEBOT_ACCESS_TOKEN - 勾选 “保存时启用”
当 NapCat 成功连接上后,python bot.py 那个终端应该会开始出现连接日志,此时你去 QQ 里向你的机器人账号发送 /ping,如果返回 /pong,那么恭喜!🎉 你的整条机器人服务链路已经全通了!
7. 优化服务链路
7.1 将 NoneBot 做成 systemd 服务
如果你确认 /ping 已经成功,那么就接着往下面看吧~
首先创建服务文件:
sudo nvim /etc/systemd/system/nonebot-qqbot.service写入下面的内容:
[Unit]
Description=NoneBot QQ Bot
After=network-online.target
Wants=network-online.target
[Service]
Type=simple
User=你的用户名
WorkingDirectory=/home/你的用户名/apps/qqbot
Environment=PATH=/home/你的用户名/apps/qqbot/.venv/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin
ExecStart=/home/你的用户名/apps/qqbot/.venv/bin/python /home/coldrain/apps/qqbot/bot.py
Restart=always
RestartSec=5
[Install]
WantedBy=multi-user.target然后启用:
sudo systemctl daemon-reload
sudo systemctl enable nonebot-qqbot
sudo systemctl start nonebot-qqbot
sudo systemctl status nonebot-qqbot --no-pager7.2 最小 NoneBot 项目改进
由于:
- NoneBot 支持用
SUPERUSERS配置超级用户;权限控制里也直接提供了SUPERUSER权限。 - NoneBot 官方建议,本地文件存储统一用
nonebot-plugin-localstore管理。 - NapCat 当前也明确建议把
message_id / user_id / group_id这类 ID 按字符串处理;而 NoneBot 配置里的SUPERUSERS也是set[str]。
所以接下来我们可以改进一下我们之前创建的最小 NoneBot 项目
首先补充一下 ~/apps/qqbot/.env 配置为下面的样子:
DRIVER=~fastapi+~websockets
HOST=127.0.0.1
PORT=8080
LOG_LEVEL=INFO
COMMAND_START=["/"]
COMMAND_SEP=["."]
ONEBOT_ACCESS_TOKEN=abc123456
SUPERUSERS=["你的 QQ 号"]
NICKNAME=["小雨","机器人"]接下来我们安装两个依赖包:
cd ~/apps/qqbot
source ./.venv/bin/activate
pip install psutil nonebot-plugin-localstore其中,psutil 用来读取 CPU / 内存 / 进程信息,nonebot-plugin-localstore 是 NoneBot 官方推荐的本地数据目录管理方案
接下来我们将入口文件 ~/apps/qqbot/bot.py 修改如下:
import nonebot
from nonebot.adapters.onebot.v11 import Adapter
from nonebot import require
nonebot.init()
driver = nonebot.get_driver()
driver.register_adapter(Adapter)
# require 和 load_plugins 都是 NoneBot 官方提供的插件加载方式
require("nonebot_plugin_localstore")
nonebot.load_plugins("plugins")
if __name__ == "__main__":
nonebot.run()修改完成之后,我们可以在此基础上,试试为我们的机器人添加一个管理员插件
首先我们新建文件:
nvim ~/apps/qqbot/plugins/admin.py在其中写入如下内容:
import platform
import time
from pathlib import Path
import subprocess
import psutil
from nonebot import on_command, require
from nonebot.permission import SUPERUSER
from nonebot.plugin import PluginMetadata
from nonebot.adapters.onebot.v11 import MessageEvent, GroupMessageEvent
from pathlib import Path
require("nonebot_plugin_localstore")
import nonebot_plugin_localstore as store
__plugin_meta__ = PluginMetadata(
name="基础管理",
description="提供 whoami / status / paths 三个基础命令",
usage=(
"/whoami 查看自己的 user_id 和当前群号\n"
"/status 查看机器人运行状态(超级用户)\n"
"/paths 查看本地存储目录(超级用户)"
),
type="application",
supported_adapters={"~onebot.v11"},
)
START_TIME = time.time()
whoami = on_command("whoami", priority=5, block=True)
status = on_command("status", permission=SUPERUSER, priority=5, block=True)
paths = on_command("paths", permission=SUPERUSER, priority=5, block=True)
@whoami.handle()
async def handle_whoami(event: MessageEvent):
user_id = event.get_user_id()
if isinstance(event, GroupMessageEvent):
msg = f"user_id={user_id}\ngroup_id={event.group_id}"
else:
msg = f"user_id={user_id}\nprivate_chat=true"
await whoami.finish(msg)
@status.handle()
async def handle_status():
proc = psutil.Process()
uptime = int(time.time() - START_TIME)
mem_mb = proc.memory_info().rss / 1024 / 1024
cpu_percent = psutil.cpu_percent(interval=0.2)
load_avg = " / ".join(f"{x:.2f}" for x in psutil.getloadavg())
temp_path = Path("/sys/class/thermal/thermal_zone0/temp")
temp_c = int(temp_path.read_text().strip()) / 1000.0
msg = (
"机器人状态:\n"
f"Python: {platform.python_version()}\n"
f"平台: {platform.platform()}\n"
f"运行时长: {uptime}s\n"
f"CPU 温度: {temp_c:.2f} °C\n"
f"进程内存: {mem_mb:.1f} MB\n"
f"系统 CPU: {cpu_percent:.1f}%\n"
f"LoadAvg: {load_avg}"
)
await status.finish(msg)
@paths.handle()
async def handle_paths():
data_dir: Path = store.get_plugin_data_dir()
cache_dir: Path = store.get_plugin_cache_dir()
config_dir: Path = store.get_plugin_config_dir()
msg = (
"localstore 路径:\n"
f"data: {data_dir}\n"
f"cache: {cache_dir}\n"
f"config: {config_dir}"
)
await paths.finish(msg)接下来重启服务,即可让我们刚才做的更改生效:
sudo systemctl restart nonebot-qqbot
sudo systemctl status nonebot-qqbot --no-pager接下来在 QQ 里尝试向机器人发送 /whoami、/status、/paths 指令试试看吧!😀
7.3 将 NapCat 做成 systemd 服务
首先我们新建服务文件:
sudo nvim /etc/systemd/system/napcat.service写入服务内容:
[Unit]
Description=NapCat QQ Server
Documentation=https://napneko.github.io/guide
After=network.target
[Service]
Type=simple
User=coldrain
WorkingDirectory=/home/coldrain
Restart=on-failure
ExecStart=/bin/bash /home/你的用户名/你的 NapCat 安装路径/launcher.sh
[Install]
WantedBy=multi-user.target启用服务并启动:
sudo systemctl daemon-reload
sudo systemctl enable napcat.service --now
sudo systemctl status napcat.service --no-pager做成服务之后,每次开启服务器就不需要手动启动 NapCat 了,而只需要在 WebUI 中登录你的机器人 QQ 号即可!
截至目前,我们已经部署好了一个基础的 NoneBot + NapCat 的 QQ 机器人项目! 🎉